



















.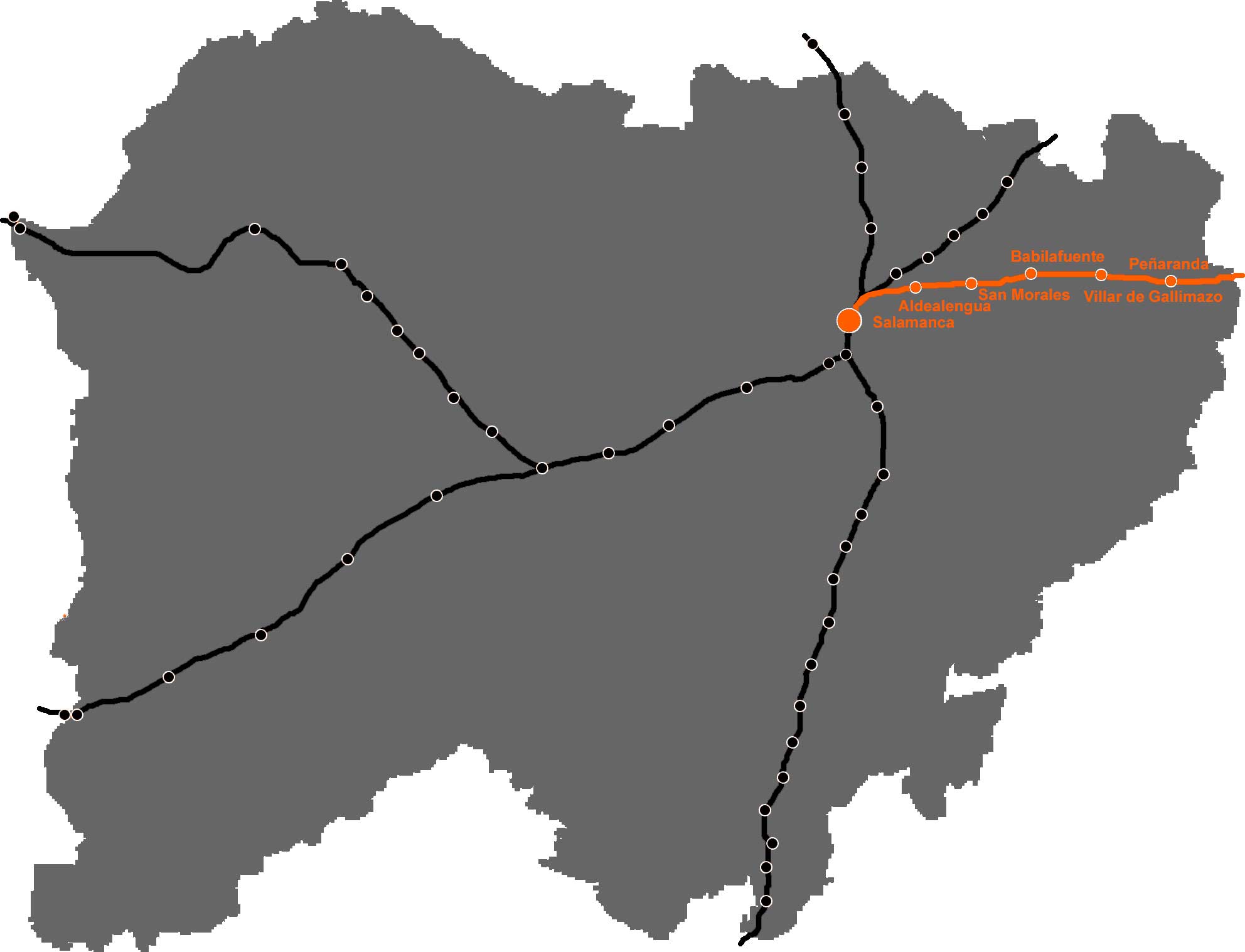
El 31 de mayo de 1894 se inaugura oficialmente la línea Peñaranda de Bracamonte a Salamanca. Esta línea se hizo para dar salida a los productos agrícolas que producía la comarca. La conexión con Ávila tal y como la conocemos ahora, tuvo lugar a finales de octubre de 1926.
En palabras de los ferroviarios, esta línea siempre tuvo un trazado muy correcto, con rasantes suaves y curvas de radios generosos.
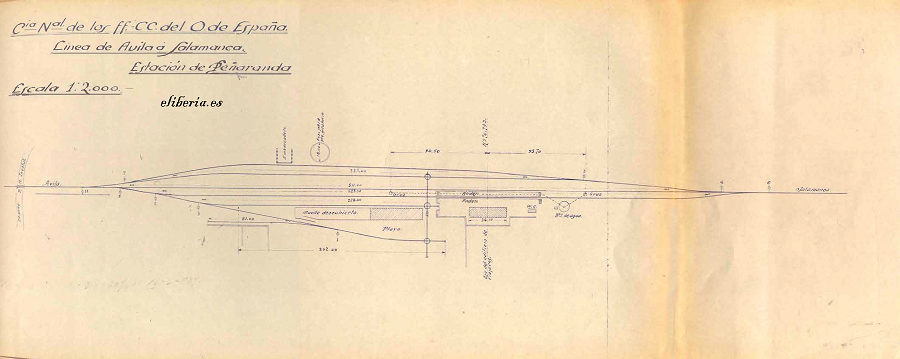
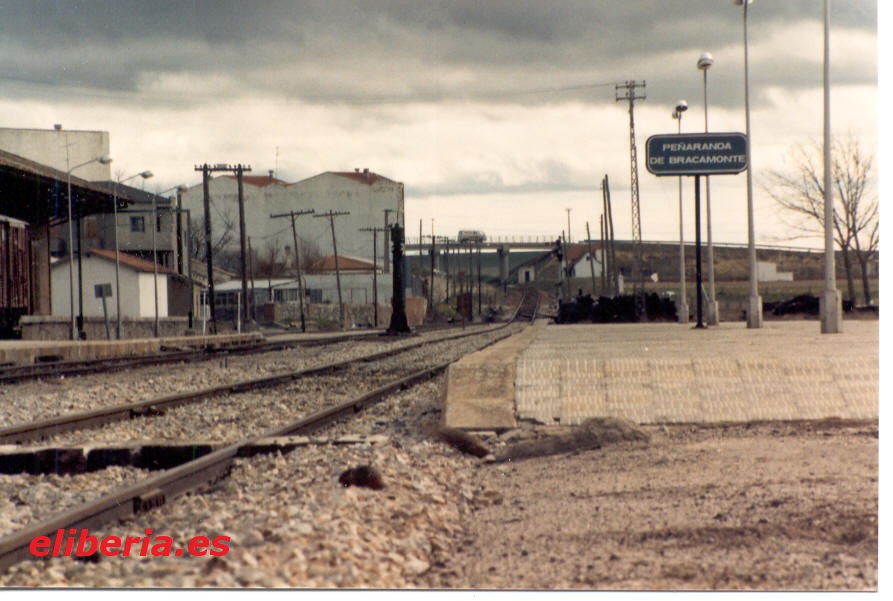
PEÑARANDA DE BRACAMONTE. PK 70,792.
Es la población más importante entre las ciudades de Salamanca y Ávila y la única que cuenta con personal ferroviario en la misma. Contaba con amplias instalaciones ferroviarias que poco a poco se han ido reduciendo. Una de las últimas actuaciones ha sido el derribo del muelle de carga que se encontraba a la derecha del edificio principal (dirección Ávila). También cuenta con elementos de la época del vapor, y todavía nos podemos encontrar con la aguada y la torre del agua. Destacó por tener un silo de grano de considerables dimensiones, que daba lugar a un tráfico de tolvas de cereales de cierta importancia. Durante bastantes años el tráfico de mercancías más importante tiene lugar en esta localidad, donde se carga piedra con dirección al puerto de Vigo. Y de allí, a Japón. En años posteriores, es la estación de Babilafuente la que desbancará a esta población.
(C) Javier P. Molina.

(C) plano y foto, Javier P. Molina. Año 1992.
En 1999 se renovó esta línea con carril proveniente del corredor Mediterráneo y fue Peñaranda junto con San Pedro del Arroyo, las dos poblaciones en las que se depositó el carril. Unos años después se empezó a construir viviendas donde antes había edificios ferroviarios, entre ellos, el muelle de mercancías que desapareció. Las fotos que tienes a continuación fueron tomadas antes de las máquinas excavadoras los derrumbaran.



(C) Javier P. Molina.
Sobre las estaciones, todas guardan una estructura muy similar, a excepción de la de Peñaranda que, fueron los propios vecinos quienes reunidos en el teatro Calderón y con ayudas de la Diputación Provincial los que contribuyeron económicamente a su construcción.
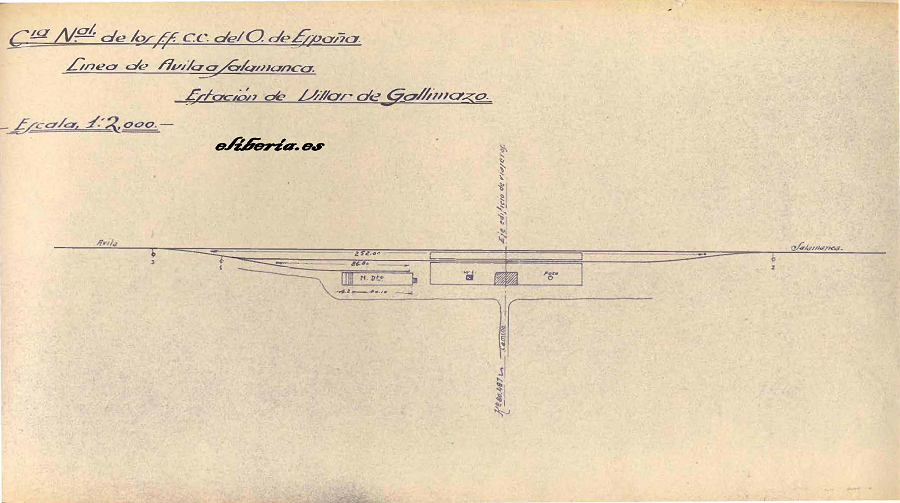
VILLAR DE GALLIMAZO. PK 80,482.
Apeadero.
Las imágenes que aparecen más abajo son de antes de la renovación de la vía de 1999.
(C) Javier P. Molina.
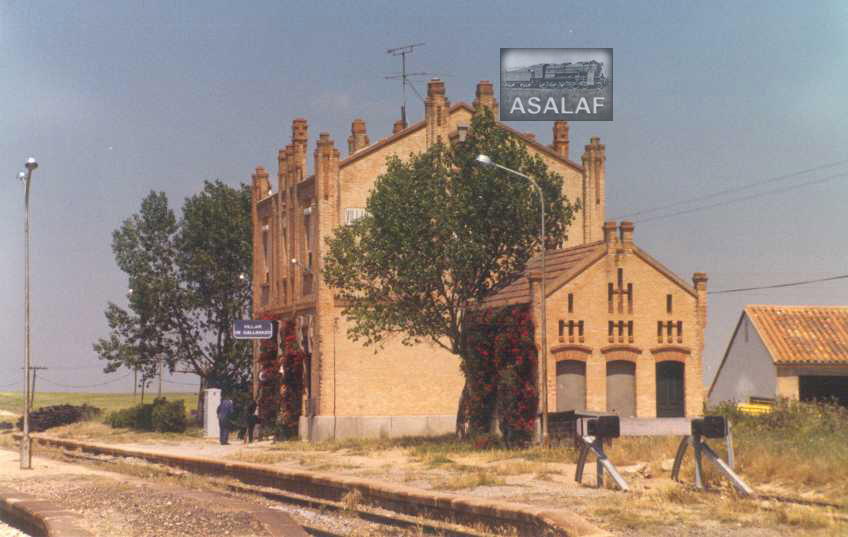


(C) Javier P. Molina, plano y fotos.
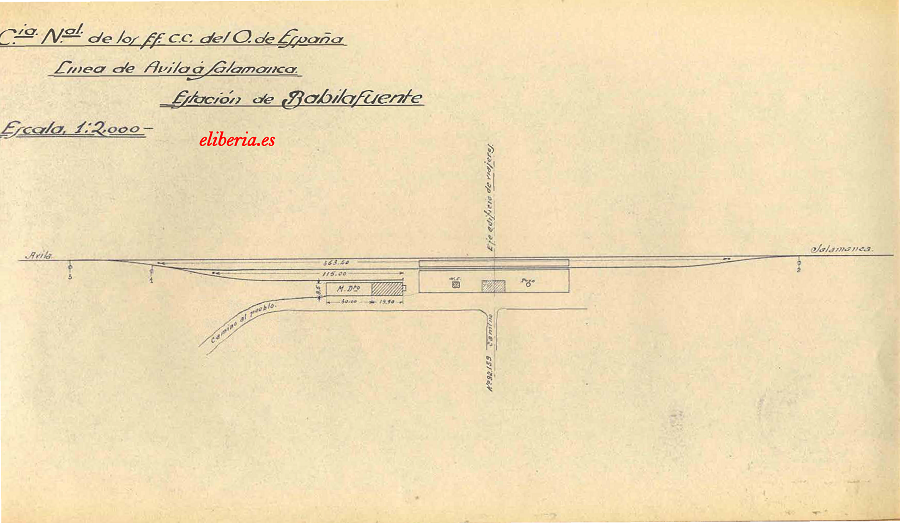
BABILAFUENTE. PK 92,159.
Estación de cruce de trenes. Hoy es en una importante estación de mercancías al instalarse aquí la planta de producción de bioetanol.
(C) Javier P. Molina.

(C) Antonio C. año 2000

(C) Javier P. Molina. Año 1997 antes de le renovación de la vía. No le falta ni un solo detalle a la imagen.

 (C) Javier P. Molina.
(C) Javier P. Molina.
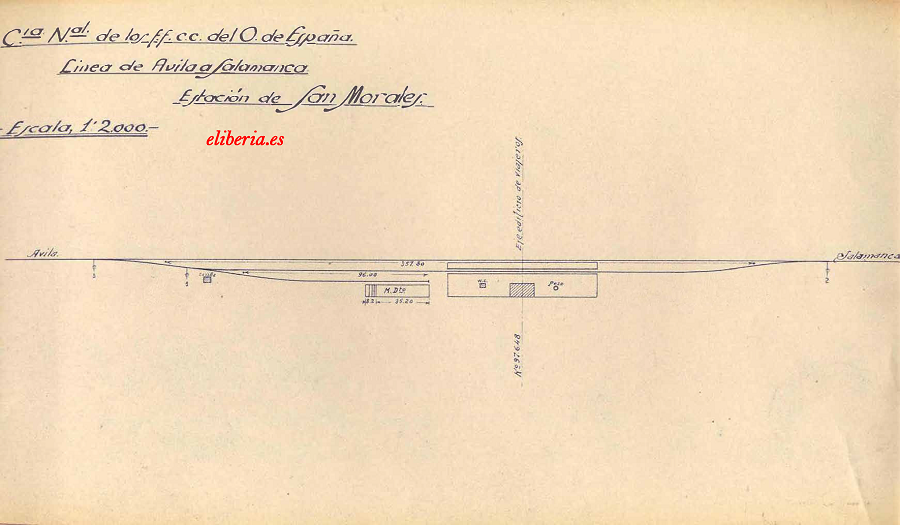
SAN MORALES. PK 97,648.
Apeadero que dista 1,5 km de la localidad.
(C) Javier P. Molina.

(C) Narciso G. Año 2003
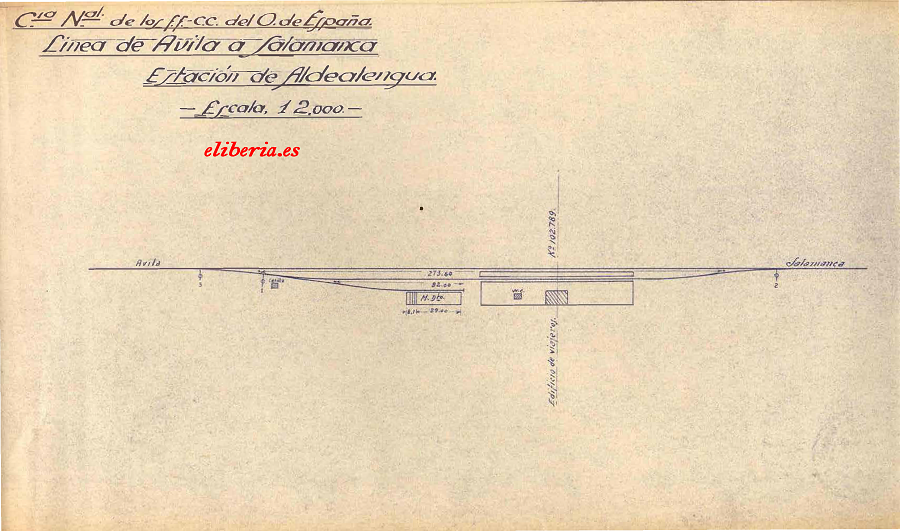
ALDEALENGUA. PK 102,789.
Estación ubicada a las afueras de la población, donde hasta hace pocos años, hubo un paso a nivel con barreras guardado por una mujer. Había un muelle para cargar mercancías y una vía para acceder al mismo.
(C) Javier P. Molina.
A la entrada de Salamanca viniendo de la línea de Peñaranda, se encuentra el famoso "Puente Ladrillo" que da nombre al barrio y, que en un principio, buena parte de su población era ferroviaria. La foto está tomada en 1997, antes de proceder a renovar la vía con material procedente del corredor mediterráneo.

(C) Javier P. Molina.
UN POCO DE HISTORIA. Facilitada por Juan Pedro Esteve (C).
La historia de este ferrocarril tiene su origen en una concesión del 11 de febrero de 1888 a favor de D. Manuel González y García Franco, sin subvención ni ayuda de ninguna clase. Poco después, este promotor transfirió la concesión a un tal Walter Seymour que a su vez la pasó a la sociedad limitada Madrid & Portugal Direct Railway (Avila & Salamanca) de capital británico, que andaba interesada en ella desde hacía cinco años. La finalidad comercial del ferrocarril, además del tráfico de viajeros, pretendía ser la de acercar a Portugal el trigo de Castilla, y a ésta el ganado vacuno y lanar lusos. Las obras comenzaron casi inmediatamente, estableciéndose el 30 de abril de 1889 un convenio con la compañía del F.C. a Medina del Campo para instalar una aguja de empalme en sus instalaciones salmantinas.
Como el 1 de mayo de 1893 no estaba lista la sección Salamanca-Peñaranda para entrar en explotación comercial, y en dicha fecha no había material rodante disponible, se firmó un nuevo convenio, ahora con la Compañía de los FF.CC. de Salamanca a la Frontera Portuguesa para que la línea de Peñaranda se explotara con locomotoras y coches del S.F.P., utilizándose en Salamanca el edificio de viajeros de la Compañía del F.C. de Medina a Salamanca.
El 16 de febrero de 1906 caducaba la primitiva concesión, y en 1908 el Estado decidió incautarse del ferrocarril, con vistas a la terminación del tramo Ávila-Peñaranda. El informe que el Ministerio de Fomento hizo de la línea advertía de las espartanas condiciones en que se realizaba el servicio, con carril de 30 kg/ml en barra de 6 metros, y con "falta de seguridad para la circulación en la vía, por carecer de su ancho normal en casi todo el trayecto, los carriles volcados al exterior, tierra en vez de balasto, más de la mitad de las traviesas indmisibles, sin material móvil, y por supuesto, sin acopios de ninguna clase (AGA OP 18550)".
Conforme fueron pasando los años, el Estado hizo importantes mejoras en el ferrocarril, sustituyendo los casetones de madera de las estaciones intermedias -Aldealengua, Babilafuente y Villar de Gallimazo- por unos edificios definitivos, idénticos a un modelo empleado en la red colonial de Marruecos, línea de Nador (minas del Rif) gracias al Ingeniero Jefe D. José de Roda que dirigió parte de la construcción del ferrocarril en el país africano. Asimismo, se añadió una nueva estación -la de San Morales, entre Aldealengua y Babilafuente- en 1910 y se hicieron nuevos convenios de explotación con las compañías vecinas.
Desde entonces todos los éxitos y desventuras de la línea han discurrido en manos del Estado Español, ya por explotación directa, ya -como desde 1928- en manos de la Compañía Nacional de los FF.CC. del Oeste de España, ya -como desde 1941- en manos de RENFE, su actual propietaria y gestora. En tiempos de Oeste, para la explotación se hacían convenios con la privada del Norte, concesionaria del tramo Madrid-Ávila. La línea de Salamanca utilizaba en Ávila la estación del Norte, sin tener más instalaciones en la ciudad que la aguja de empalme.